Vysavač se ke mě dostal s problémem, že se mu netočí jedno hnací kolo. Ty bylo jednak vidět a i to vysavač hlásil po provedení Power On Self Testu. Majitel zkusil vyměnit původní hnací kolo za nové, ale to nepomohlo. Bylo tedy jasné, že chyba je jinde.
Analýza poruchy vysavače
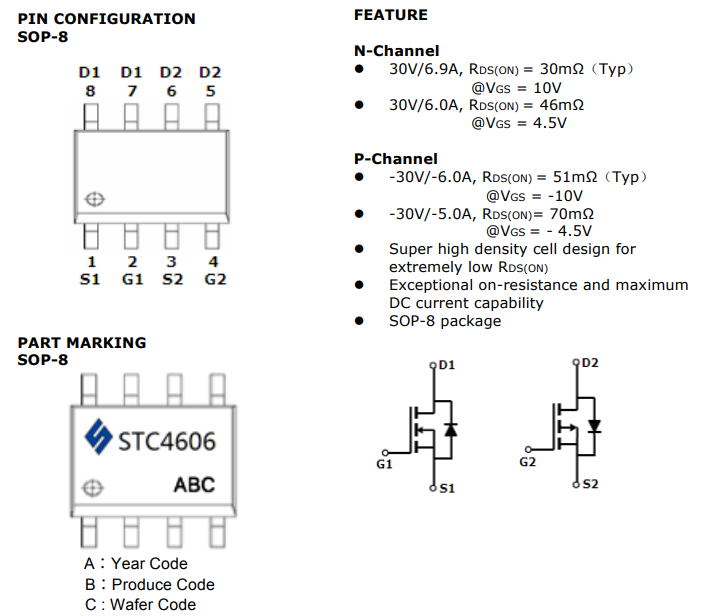
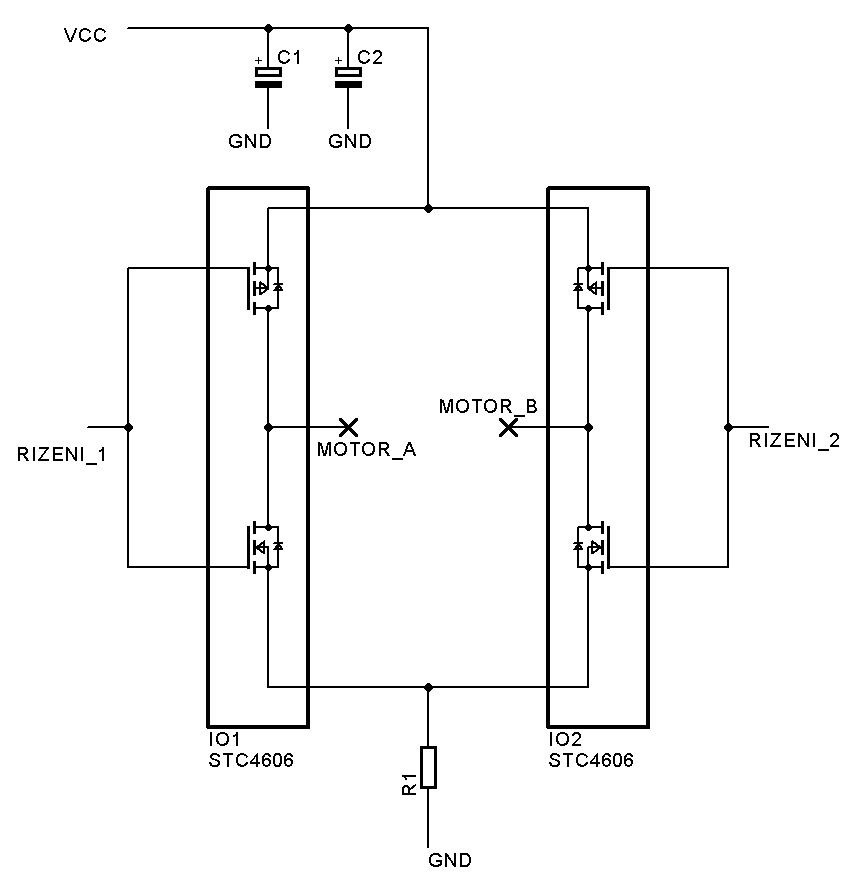
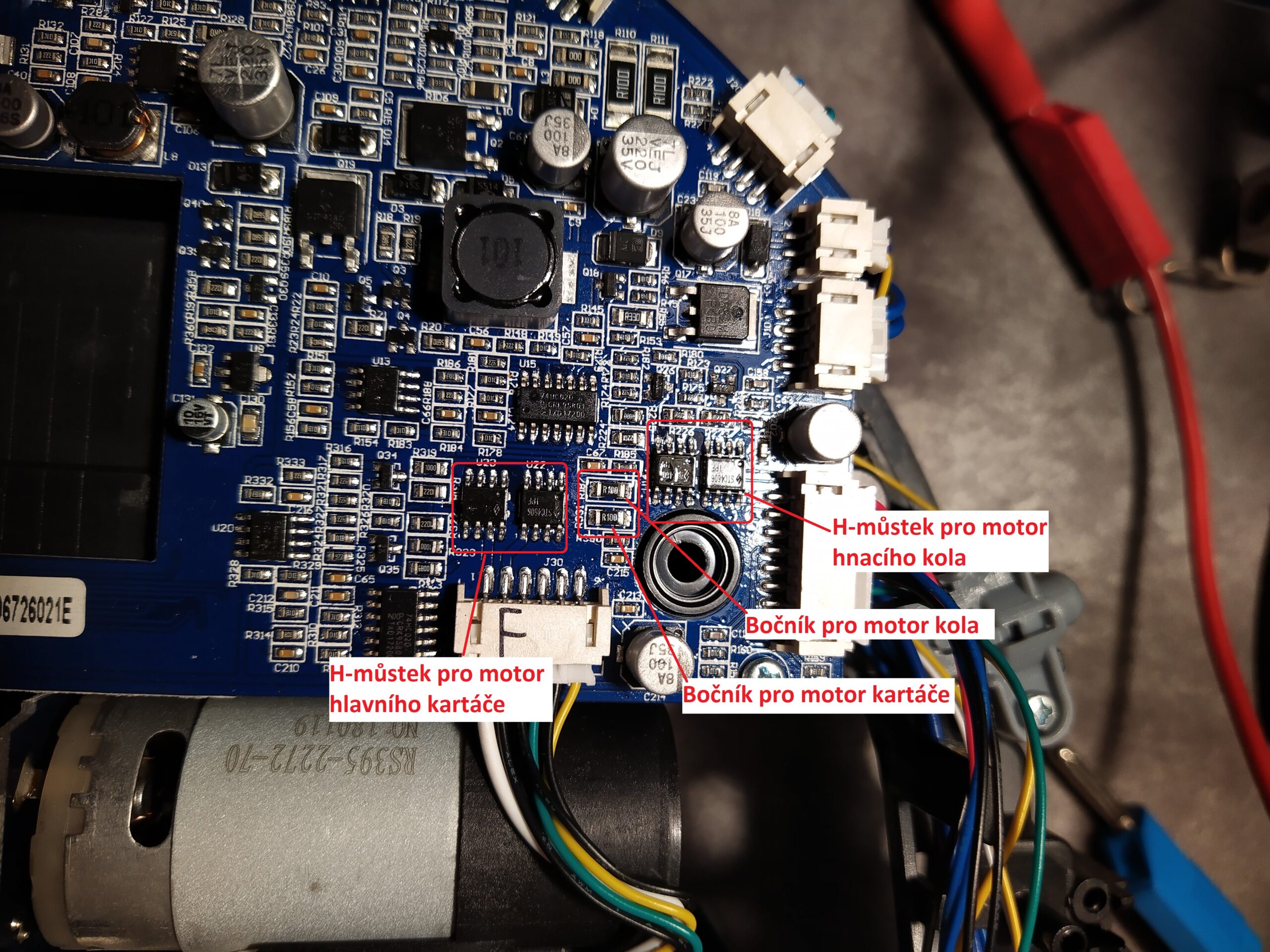
Pohon kol vysavače a motoru, ovládajícího hlavní kartáč je řízen přes H-můstky. Ty jsou zde sestaveny vždy pomocí dvou integrovaných obvodů STC4606. V každém obvodu je integrován jeden P-MOS a jeden N-MOS tranzistor. Každý tento obvod je zapojen jako půlmůstek a dva obvody dohromady tvoří celý H-můstek. Pod každým můstkem je standardně snímán proud motoru pomocí bočníku. Zpětná vazba z motorů je zajištěna jednoduchými IR snímači na hřídelích motorů. Na tuto část vysavače jsme se zaměřil jako první. Jde do můstku nějaký signál? Je na výstupu můstku signál? Funguje zpětná vazba?
Pro informaci, výřez z datasheetu použitých integrovaných obvodů STC4606 a zjednodušené schéma zapojení můstků ve vysavači.
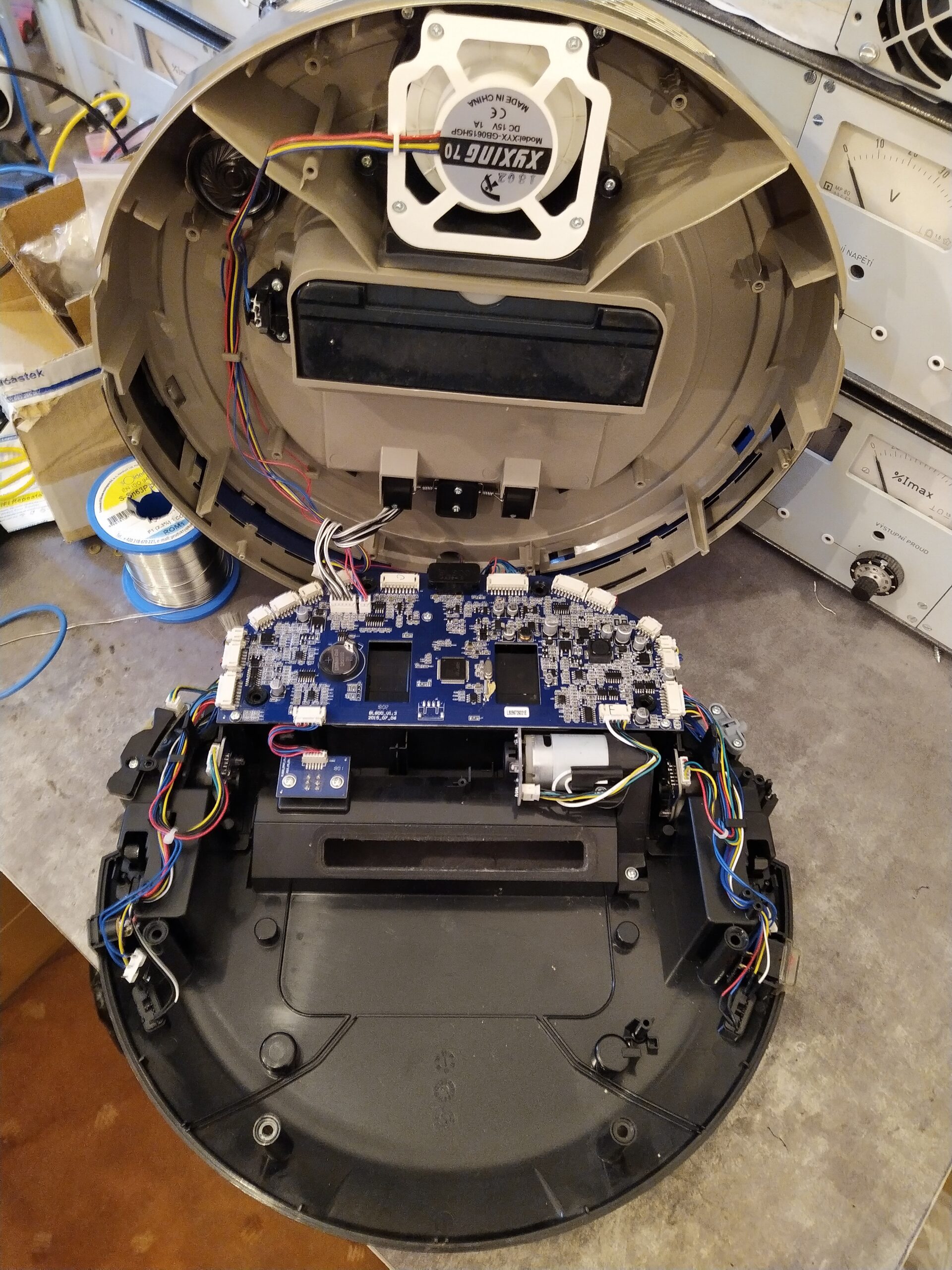
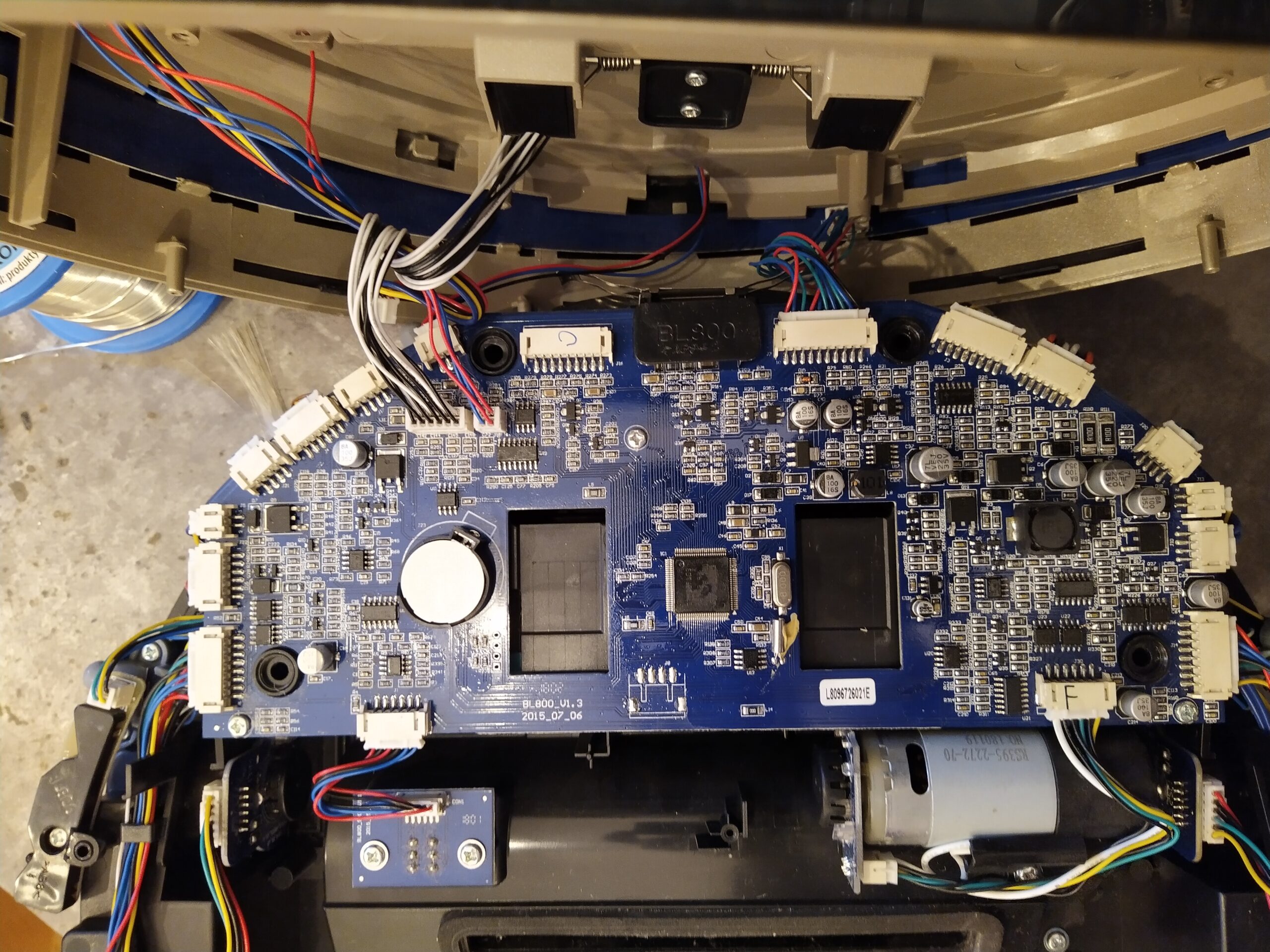
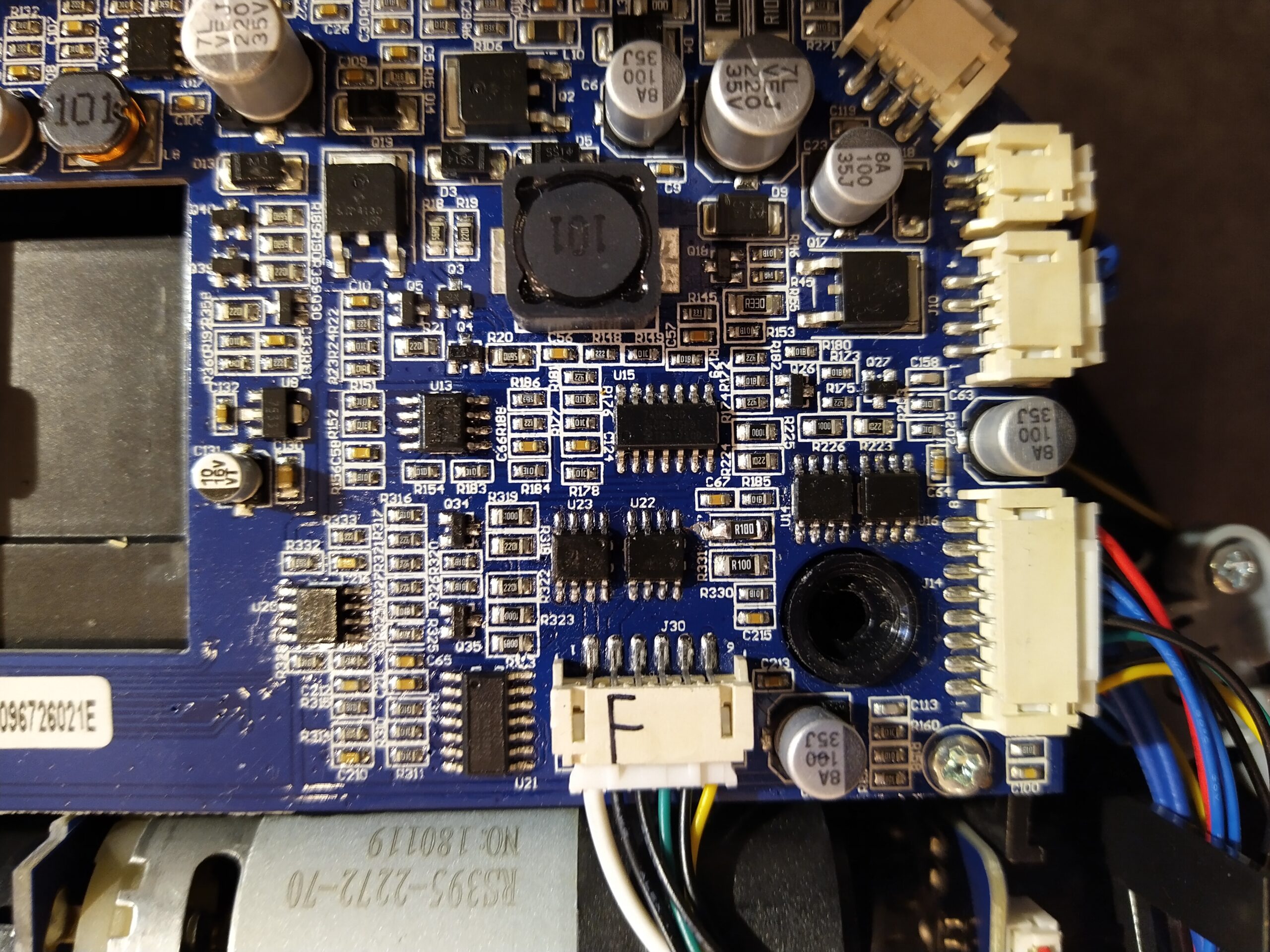
Pohled na celou elektroniku robotického vysavače s detailem na část pro ovládání motoru hnacího kola.
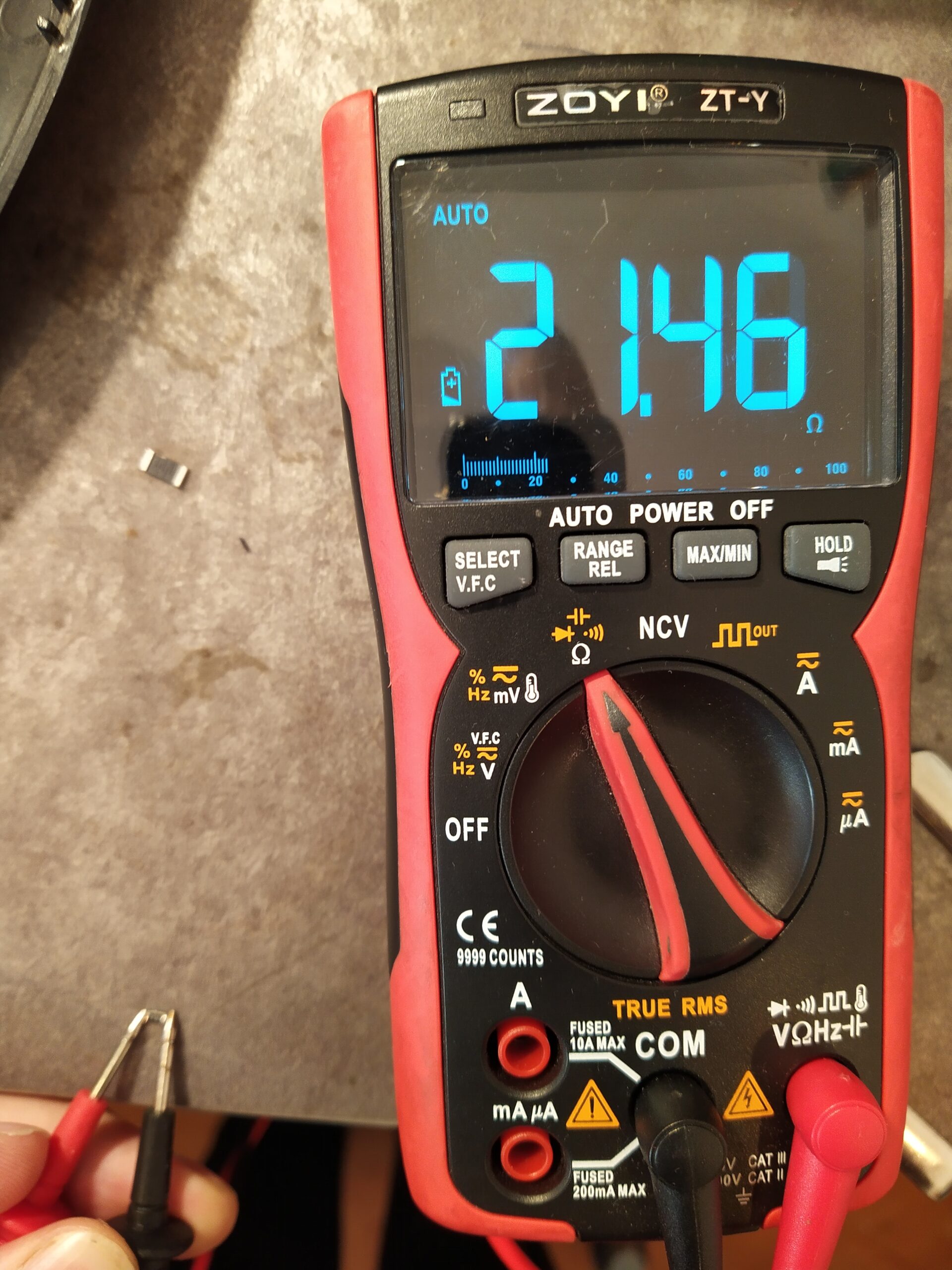
V tomto případě bylo nalezení problému celkem snadné. Na vstup můstku šel kvalitní signál, můstek byl v pořádku, motor a zpětná vazba také, ale i přes to se motor netočil. Problém byl ve špatném bočníku. Ve vysavači jsou použity bočníky o hodnotě 0R1 ve velikosti 1206 a tento zřejmě nevydržel špičkové proudy motoru. Rezistoru, který má mít hodnotu 0R1 jsem naměřil 21 Ω.
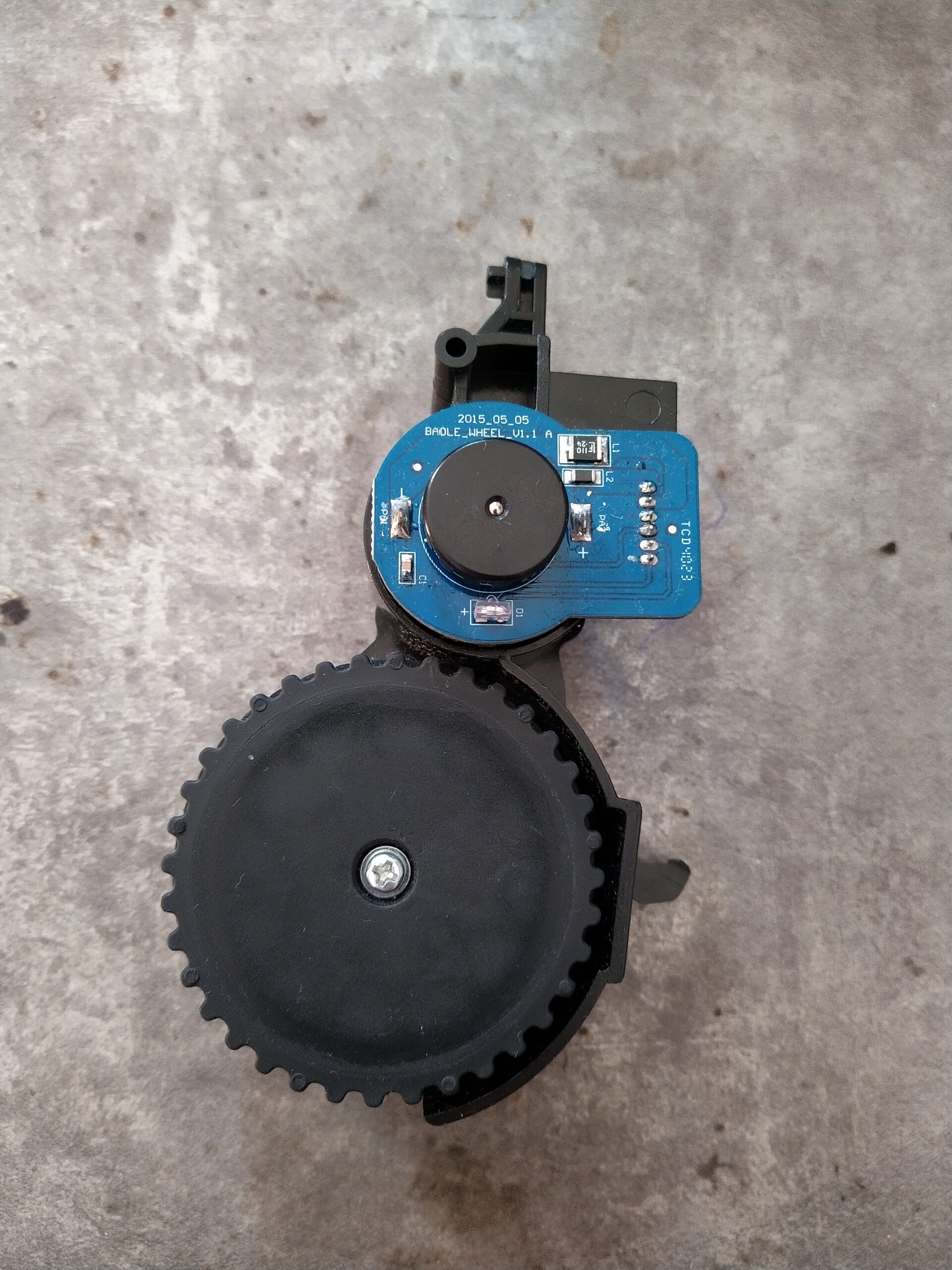
Hnací kolo s IR snímačem otáček motoru.
Oprava vysavače
Oprava spočívala ve výměně bočníku. Poté se robotický vysavač znovu rozjel 🙂
Opraveno
Vysavač v nabíječce.
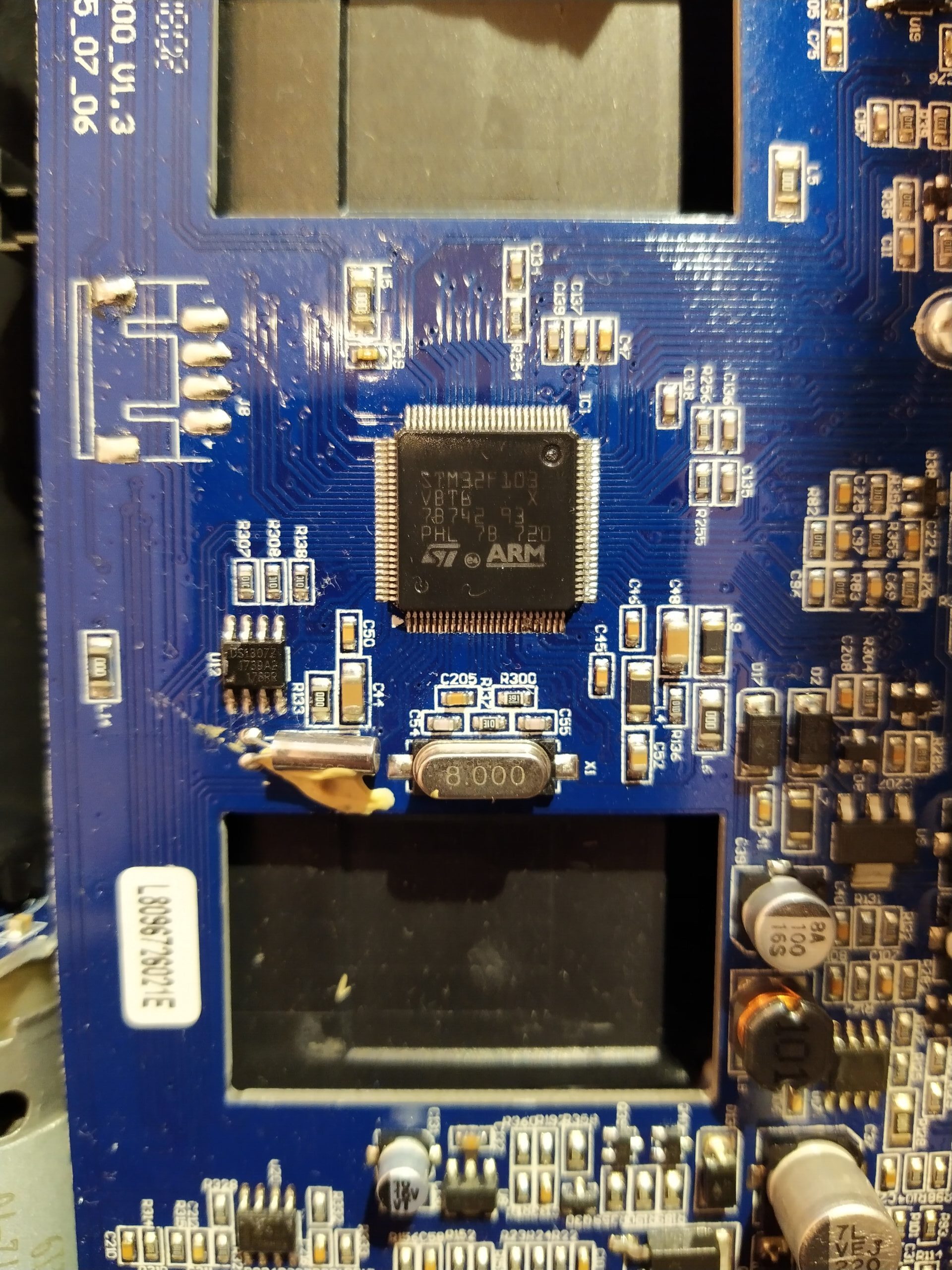
Zde už je pouze pro zajímavost detail na procesor použitý ve vysavači – je to naprostá klasika STM32F103 🙂